A team of Georgia Tech scientists deploys an ocean robot under the Antarctic ice shelf to explore life in extreme environments. Ben Huruwitz, a first year OSE students working with Dr. Britney Schmidt, tells his story.
“Fun” is not something that one immediately thinks of when thinking of Antarctica. “Cold,” “dry,” and “windy,” perhaps, but not “fun.” But with my first steps on the Ice on our first shuttle ride with Shuttle Bob, it was immediately clear that I was thinking about this all wrong: “fun” is one of the more important things on the Ice.
As a first-year Ph.D. student in the Ocean Science and Engineering program at Georgia Tech, this has been a whirlwind few months. After graduating in May from the University of Maryland with a fresh B.S. in Electrical Enigineering, I spent the long summer days working on an toaster-oven-sized autonomous underwater vehicle (AUV) with the Robotics At Maryland team for the 2017 RoboSub competition before moving down to Atlanta to work on the big fish: a 12-foot long, nine-inch diameter remote-operated vehicle (ROV) ... the Icefin ...
Read more on Ben's blog on the Icefin mission
Icefin Ocean Robot
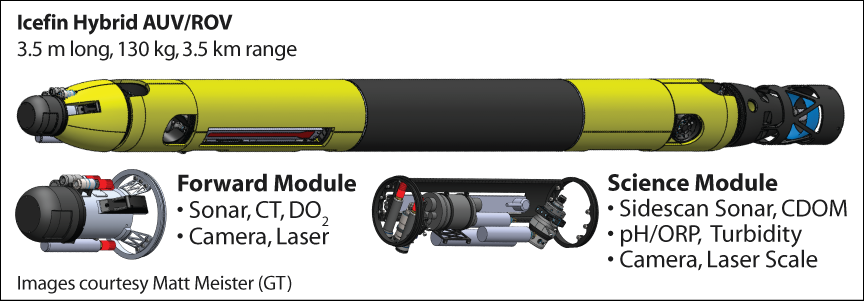
Icefin is a unique and science-enabling hybrid remote-operated and autonomous under-ice vehicle (ROV/AUV) that is modular and field-portable; it is essentially a small, long-range, deep-water under-ice robotic oceanographer. Icefin’s primary capability is surveillance of oceanographic cavity geometry (through sonar mapping), ice properties and ocean conditions around and beneath floating ice. The technology of the Icefin project will enhance the ability for mapping of the sub-shelf environment, add chemical and biological sensors to the physical oceanography capabilities, and make in situ data possible. Use of this platform means that we can dramatically improve the ability to correlate phenomena such as ocean currents, distinct water masses, basal ice melt (and thus influx of fresh water or production of bottom water), ice accretion, distribution of organisms, and sea floor properties and topography, exactly as a future Europan platform would require.

Icefin was designed and built at Georgia Tech, under the PI Dr. Britney Schmidt’s startup funds, and is being augmented under a NASA PSTAR grant (RISE UP: PI Schmidt). Icefin’s unique design provides greater capability and improved operational simplicity relative to larger vehicles and leverages technology developed by Georgia Tech (Spears et al 2015). Icefin is optimized by modularity: the vehicle consists of detachable sections containing the thrusters, power and electronics, and a sensor bay. Multiple sensor bays are developed to serve multiple science objectives, maintaining small size and mission science flexibility. As opposed to larger vehicles (e.g. Autosub at 2.2 tons), the relatively small modular Icefin vehicle is designed to deploy through boreholes already drilled to place ocean moorings. Its modular design is robust to failures, allows easy switching of sensors without increasing vehicle size, reduces the assembly time of the vehicle, and provides a simpler mode for disassembly while in the deep field. The vehicle can be customized for each mission, with sensors pointing up or down depending on whether the ice or the sea floor is under study, simply by turning the sensor bay. The first Icefin configuration has been developed and successfully operated in Antarctica in Austral summer 2014 (Spears et al., 2016). Icefin was deployed through the sea ice and through the McMurdo Ice Shelf and successfully collected sonar, imaging, video and water column data.
Most vehicles in Icefin’s size class that deploy under the ice are essentially swimming cameras, or have short range. Icefin is currently fitted with sensors for scientific analysis of the ice-ocean system including the science instruments detailed in Table 1. The forward module includes a forward-looking blazed array sonar, a CTD sensor and obstacle avoidance and surveying camera. The guidance navigation and control of Icefin allow for efficient collection of scientific data through the fusion of an advance fiber optic gyro (FOG) inertial measurement unit (IMU), compass, DVL, altimeter and pressure sensor for low-level motion control and high-level localization. Icefin also includes vehicle health sensors such as leak detectors and power remaining useful life. The vehicle is rated to 1.5 km depth, weighs 280 lb in air, is 9” in diameter and 12’ long. The vehicle can be deployed horizontally or vertically through a drill hole and supervised by a 3 mm diameter Kevlar-reinforced fiber optic tether rated to 450 lb with a strength-enforced termination at the vehicle and a length of 3.5 km for communication, data retrieval, and vehicle recovery. The vehicle’s thruster design provides control for full holonomic five degrees of freedom for vehicle movement with no protruding surfaces. This allows the vehicle to easily control pitch, yaw, heave (up and down) and sway (side-to-side). The thruster configuration provides the stabilization that is necessary to hover in the water for data and image collection missions, and eventually for sampling.
